 Arion Zimmermann
Arion Zimmermann
Projects
A showcase of my major robotics, aerospace, and software engineering projects.
Robotics Projects
Caltech Racer Autonomous Race Car (2025)
Research Engineer
High-speed autonomous racing on controlled environments (race tracks) and active participation in the Indy Autonomous Challenge international competition.
Highlights:
- Fully autonomous race car, able to overtake and make decisions in real time
- Speeds up to 300km/h, accelerations up to 1.5g
- Sensor suite consisting of 3 LiDARs, 6 cameras, 3 IMUs, 2 RTK GPS, 2 Radars, 4 wheel odometry sensors
- Non-linear controller, MPC, and offline global optimizer for motion planning
- LiDAR-based and YOLO competitor car detection and tracking
- Exciting SOTA research coming soon (ICRA’26)
Achievements:
- Third fastest lap time at the Laguna Seca Indy Autonomous Challenge competition (before spinning out 🙊)
Contributions (perception):
- Complete LiDAR-based perception stack to detect competing cars
- Modular C++ framework to accomodate other modalities for competitor car detection
- EKF with feed-forward accelerations inferred from an assumed global trajectory of the competing cars
- Testing and benchmarking suite to validate the perception stack
- Consolidated multi-car dataset with camera, lidar and groud-truth data.
Contributions (localization):
- Mapping framework to generate LiDAR maps of racetracks
- Extended MSCKF state to include higher fidelity sensor measurement models
- Extended MINS with multi-threading capabilities
- Sensor calibration and low-level system tuning
Technologies: C++, ROS2, PCL, CUDA, GNN, YOLO, ICP, OpenMP, EKF, MSCKF
EPFL Xplore Rovers (2020-2023)
Founder, Project Manager, Systems Engineer
Led a team of more than 60 students to develop autonomous rovers for the European Rover Challenge over three years, achieving multiple podium finishes and special recognition awards.
Highlights:
- 60kg versatile rover participating yearly in the European Rover Challenge
- Full in-house structure, mechanisms, electronics and software stack
- Complete mission autonomy
- Perception system enabling autonomous navigation in challenging terrains
- Scientific analysis payload with chemical compounds sensor, raman spectrometry, camera-based sample statistics for complex scientific tasks
- 6DoF integrated robotic arm for complex manipulation tasks
- Rocker-differential 4-wheeled structure for a facilitated navigation in rough terrains
- Fully redundant power management system and avionics
Achievements:
- 3rd place at ERC2023 World Finals with special award for best robotic arm
- 2nd place at ERC2022 World Finals with special award for best autonomous navigation
- 3rd place at ERC2021 World Finals with special award for best science plan and best sample probing
Contributions (as co-founder):
- Sharing vision on the importance of robotics and space exploration
- Sharing vision on the importance of hands-on projects for EPFL students
- Fundraising ($150K per year)
- Interfacing project with stakeholders
- Organize / participate in events
- Deliverable consolidation for stakeholders and competiton committee
Contributions (as electronics systems engineer):
- Requirements definition
- Initial electronics architecture
- Power system architecture
- Power and energy budget allocation
- Sensor selection
- Assembly, Integration & Testing planning
- ConOps definition
Contributions (as software systems engineer):
- Requirements definition
- Initial software architecture
- Embedded software firmware and sensor acquisition
- Custom communication protocol (Link)
- Networking with EtherCAT and PoE
- Part of the autonomous navigation stack (pointcloud segmentation and obstacle detection)
- Part of the navigation kinematics model
- Assembly, Integration & Testing planning
- ConOps definition
Contributions (as project manager):
- Budget management
- Timeline management
- Risk management
- Sprints/PDR/CDR organization
Contributions (as power system designer): Link
Contributions (as drone systems engineer): Link
Technologies: ROS, ROS2, Altium, LTSpice, LTPowerCAD, Fusion 360, C, C++, PCL, LIO-SAM, Kinematics, Nvidia Jetson, Linux, EtherCat, CANopen
Aerospace Projects
EPFL Rocket Team Rockets (2019-2021)
Avionics Team Leader
Student-led rocketry association, designing sounding, bi-liquid and hybrid rockets. Leader of the avionics software team for the BellaLui II rocket and member of the avionics team for BellaLui I.

Photo credit: Erik Uythoven
Highlights:
- Hybrid rocket (N2O + ABS)
- 10000ft target altitude
- 2-stage recovery system
Achievements:
- 1st place EuRoC International Competition
- 2nd place Spaceport America Cup in SRAD-10K category
- Successful launch and recovery with full mission objectives met
Contributions:
- Management of Avionics Team
- Embedded software architecture
- Sensor acquisition and filtering
- Telemetry
- Logging
Technologies: C, C++, Altium
EPFL Xplore Drone (2023)
Systems Engineer
Rapid development of autonomous drone for rover-based aerial reconnaissance in under 6 months.
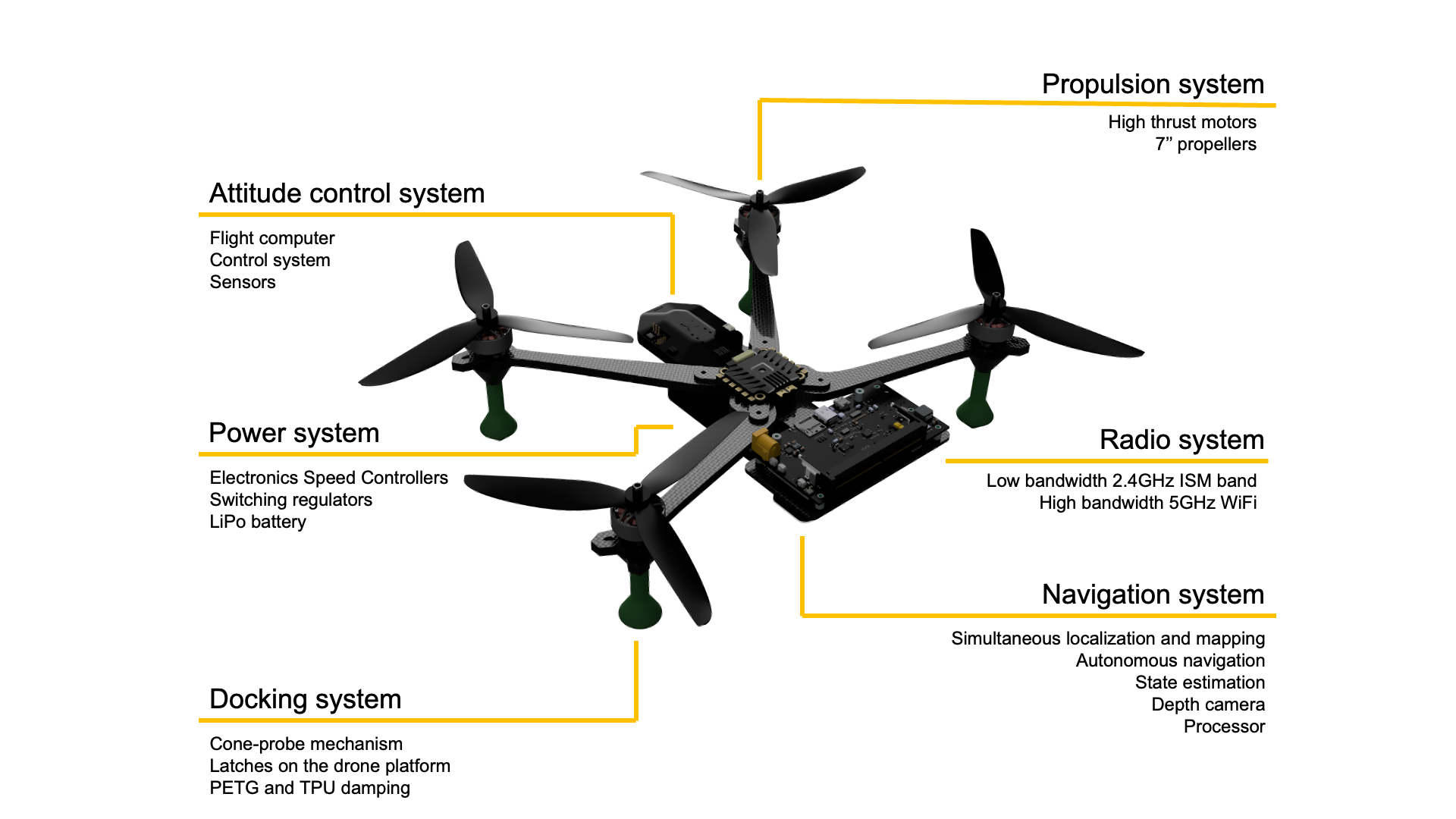
Highlights:
- In-house avionics and flight computer
- In-house motor controller
- In-house autonomy stack
- In-house structure
- Successful deployment at ERC 2023 World Finals
Achievements:
- Contributed to EPFL Xplore’s 3rd place at ERC2023 World Finals
Contributions:
- Systems engineering and high-level design
- Perception and localization stack
- Power supply
- Numerous other contributions among all subsystems
Technologies: C++, ROS2, OpenCV, Capella MBSE, Fusion 360, KiCad, Altium, Embedded Linux, PID control
SpeQtral QKD Satellite (2023)
Systems Engineering Intern
Quantum Key Distribution satellite startup in Singapore, focused on secure key exchange among banks and governments.
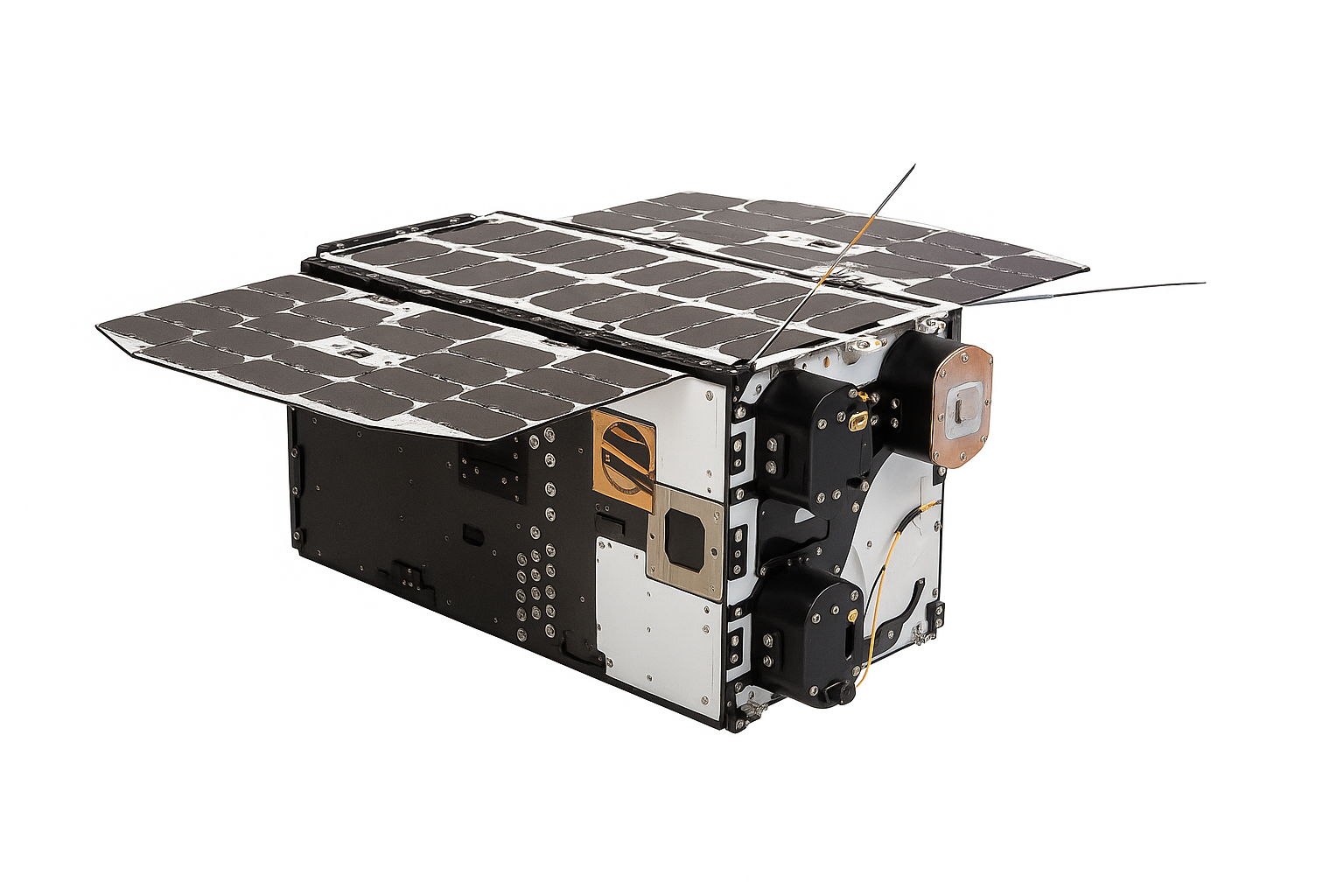
Highlights:
- 16U CubeSat
- BB84/BBM92 quantum protocols
- Weak coherent pulse source and entangled photon source
Contributions:
- Firmware validation of Speqtre (launching late 2025)
- Firmware architecture and development for SpeQtral-1 (launching late 2026)
- Design of a Thermal Test Model
- Design of spacegrade PCBs
Technologies: SystemVerilog, Altium
Personal Projects
Stealth Startup (2024-2025)
Social x Review App
Highlights: secret
Technologies: Kotlin, React native, Microservice architecture
RoCo Communication Protocol (2020)
EPFL Xplore
Ultra-low-latency communication system for resource-constrained embedded systems implementing an OSI Network layer on standard embedded system busses (I2C, SPI, UART, Ethernet, CAN).
Highlights:
- Uses static memory exclusively
- Publisher/Subscriber model
- Interfacable with ROS2
- Actively used on EPFL Xplore rovers and drones
Technologies: C++, STM32
Rocket Avionics Logging (2019)
EPFL Rocket Team
Robust logging system for rocket avionics. Stores flight data in QuadSPI flash memory.
Highlights:
- Uses static memory exclusively
- Block-based filesystem with partition tables
- Survives shutdown-while-writing events and safely overrides irrelevant past logs
Technologies: C, STM32
Lexis Language Learning App (2019)
Personal Project
Modernized teaching tool for ancient languages. Adaptive vocabulary teaching of most used words in Latin and Ancient Greek.
Highlights:
- Used by students of the 2019 Ancient Greek cohort in Geneva
Technologies: React native